航空機認識の実証実験第2フェーズを開始
空港内制限区域における車両自律走行のための航空機認識
実証実験 第1フェーズ完了 第2フェーズ開始
製造業を中心にソリューションを提供している株式会社APC(本社:大分市、代表取締役:佐藤 隆己、以下 APC)は、株式会社JALインフォテックと協力し、空港内サービスレーンにおける特殊車両の安全確保と自律走行を目的とした航空機認識の実証実験を実施した。第1フェーズは2021年11月末日に完了し、2022年2月より第2フェーズを開始する。

■ 実証実験 第1フェーズ 経緯
すでに鉄鋼生産工場設備に多くのコンピュータービジョン・ソリューションを提供し生産業務の自動化に貢献していたAPCに対して、空港内制限区域における安全確保の目的で今まで人が目視や音によって行なってきた航空機エンジンの稼働判定の自動化を図りたいとの相談があり、まずは第1フェーズとして、判定対象となる地上走行中の航空機を遠方から認識して距離や速度を正確に検出することから始めることとし、実証実験を実施した。

■ 実証実験 第1フェーズ 概要・結果
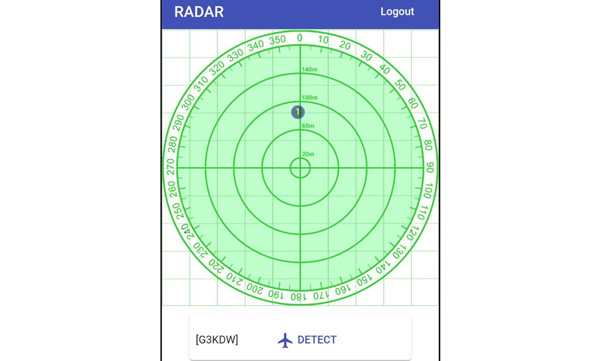
空港内の地上走行中の航空機を対象として、LiDAR※1と360°光学カメラを組み合わせて データを取得し、クラウド上で稼働中の学習済みAIモデルを使って航空機を検出、対象までの距離・角度を正確に算出する。結果はリアルタイムで実施者のスマートフォンの画面に表示される。航空機は昼間の認識率 96.7%で認識され、100m以内の航空機において算出された距離と実測値との誤差の平均は15%であった。これは100mの距離を85mから115mまでの値で測定したことを意味する。
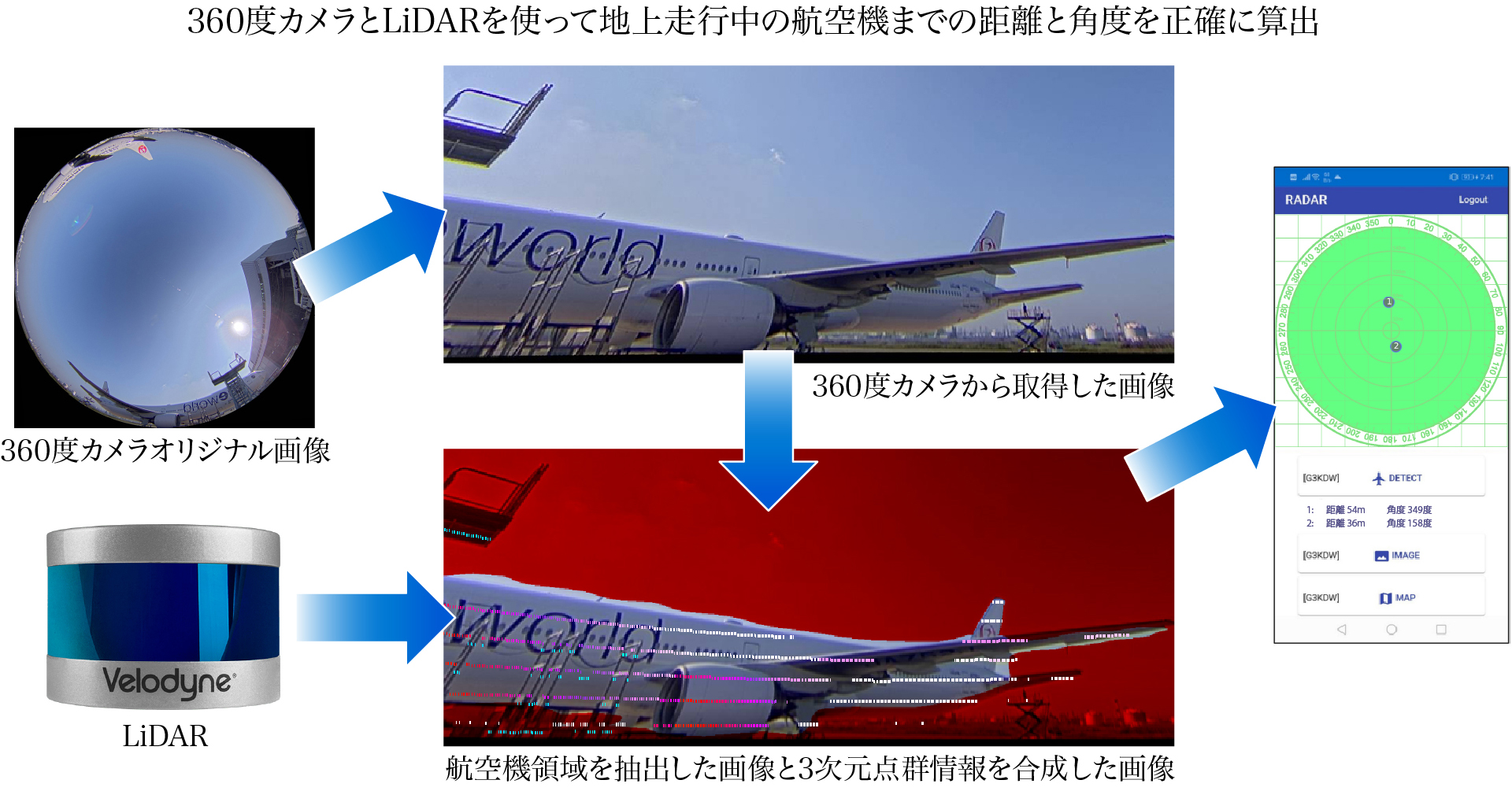
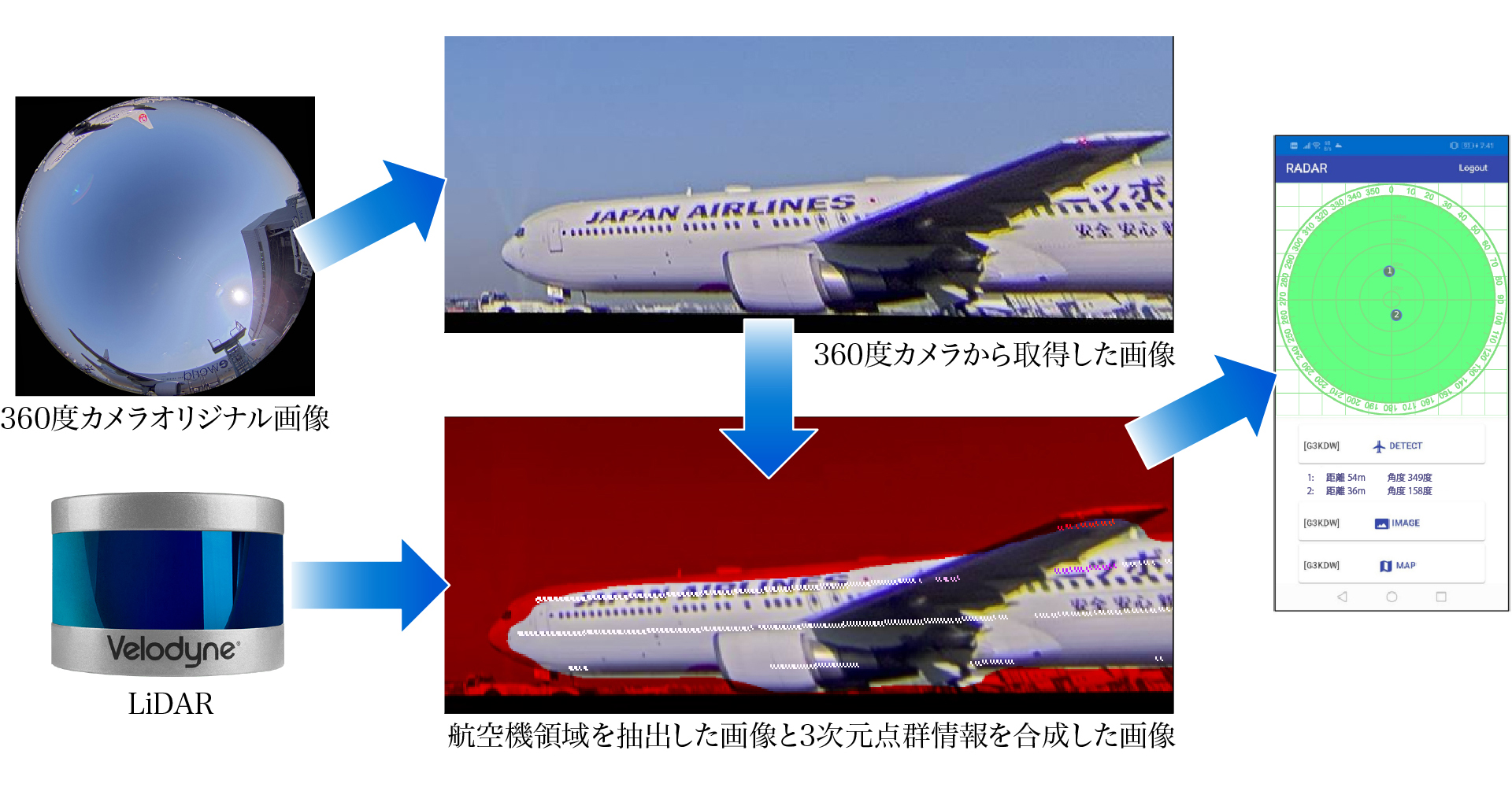
検出された航空機までの距離と角度は、Chimeraのビジュアライザーでスマートフォンに表示される。
■ 実証実験 第2フェーズ 経緯
第1フェーズで良好な結果が得られたことから、航空機の認識範囲を広げ、実運用を想定した機能を付加して第2フェーズを実施することになった。
■ 実証実験 第2フェーズ 概要
より遠方の航空機を認識し、位置・速度・加速度を算出することにより、航空機の位置を時系列に予測し、自車両との距離が安全確保のための最低距離100m以上である状態を確保しつつ、安全にサービスレーンを走行完了できるかどうかを判断する。
天候等の環境によらず、対象航空機について、自走中か牽引中か、エンジン稼働中か停止中かなどの制限区域走行の条件に従い、適切に判断できることを目標とする。
■ APCの特徴
APCは、「技の数値化 ~匠のAI~」というコンセプトのもと、LiDAR※1や360度光学カメラといったイメージセンサーとAI技術によって画像認識・空間情報処理を行うシステムを開発している。なかでも、人の感覚や業務における暗黙知を数値化することを得意とし、機械学習により重機や大型産業機械の自動運転・操作支援システムにつなげている。本実証実験用のシステム開発では、自社開発のフレームワークChimera※2 AIを用いて効率的な開発を実施する。
■ 本件に関するお問い合わせ先
- 企業名:株式会社APC
- TEL:097-573-6616
- Email:chimera@oita-apc.co.jp
- HP: https://www.oita-apc.co.jp
- 「技の数値化 ~匠のAI~」:https://www.oita-apc.co.jp/service/consulting/ai/waza/
- 「目視の自動化 ~現場のAI~」:https://www.oita-apc.co.jp/service/consulting/ai/mokushilp/
- ※1 LiDARとはレーザー光を使って対象物までの距離を正確に測定するセンサーの一種です。
- ※2 ChimeraとはAPCが開発したIoTフレームワークです。