

特殊機器操作における作業時間を均一化したい

熟練技能者の感覚や暗黙知を数値化する
LiDARや360度光学カメラといったイメージセンサとAI技術によって
画像認識・空間情報処理を行うシステムを開発することで実現。
機械学習により重機や大型産業機械の自動運転・操作支援システムにつなげます。
こんなお悩みはありませんか?


システム化を諦めていた対象物はありませんか?
自己位置推定物体検出
作業に支障を及ぼす障害物を検知します。障害のサイズや検知感度、障害物までの距離などは自由に設定できます。
操作支援
LiDARやカメラを使って作業空間を認識し、操作対象物の位置や角度のズレを検出してオペレーターの操作端末に表示します。
空間・環境認識
LiDARをバリアーとして用いることで、ある領域に侵入すると警告を発するシステムの構築が可能です。カメラによる認識は天候などの影響を受け易いですが、LiDARは外乱を受け難く昼夜問わず有効です。

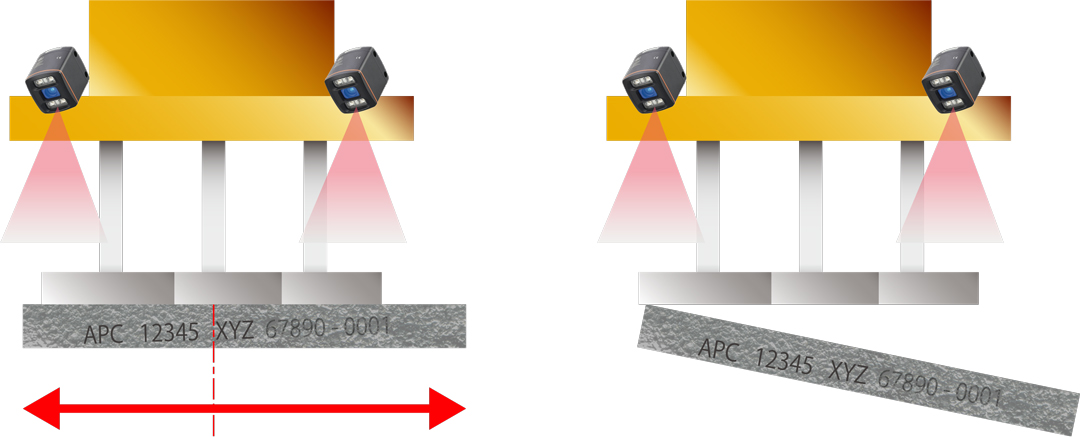
鉄鋼メーカー向け
大型クレーンの吊り位置ズレ検出
LiDARを使用して取得した3次元空間情報により重心からのズレを高精度で検出
クレーンで吊り上げられた対象物は、吊り上げ位置が重心と正確に一致していない場合は傾いたり重機に大きな負荷がかかるため、安全確保に問題が生じます。LiDARによって取得した空間情報から、吊り上げ対象物の重心と吊り上げ位置とのズレを高精度(長さ方向に対して0.5%の誤差)で算出します。
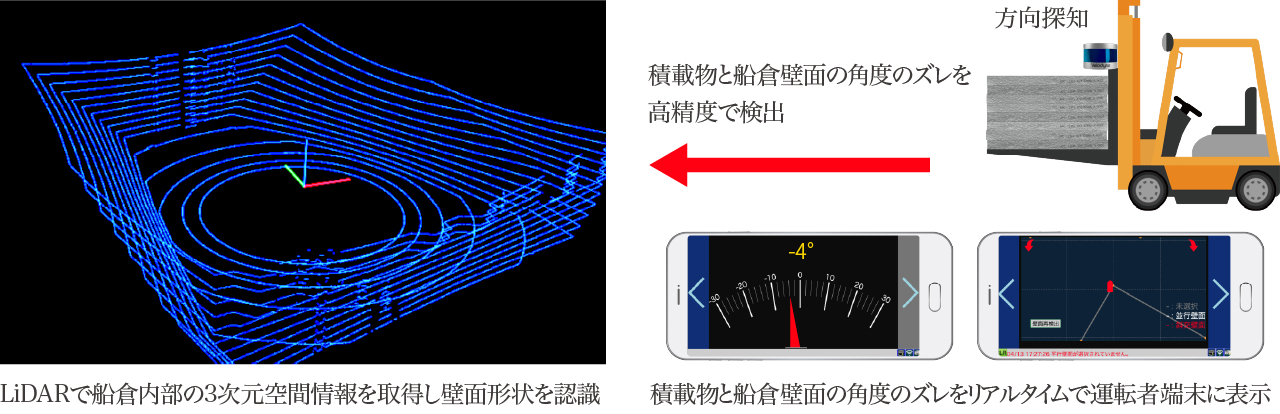
物流会社向け
大型特殊重機の運転支援
LiDARで取得した3次元空間情報から重機の姿勢を高精度・リアルタイムで数値化
荷崩れを起こしやすい積載物は、輸送船に積み込む際に方向を正確に揃える必要がありますが、重機を使っての作業は高度な操作技術を要するもので時間がかかっていました。輸送船の船倉内部ではGPS電波は届かず、ジャイロもドリフトによる誤差や輸送船そのものの揺れの影響で使用できないため、LiDARを使って輸送船の船倉壁面を認識し、船首方向に対する積載物の角度を高精度に算出しています。重機に搭載して利用するシステムで、船倉に対してマーカー設置など全く手を加える必要がなく、様々な形状の船倉にも対応しています。結果を表示するスマートフォンは複数接続可能で、運転者以外でもリモートで積載角度を把握することができるため、熟練技術者による後進育成・技術の継承にも有効です。
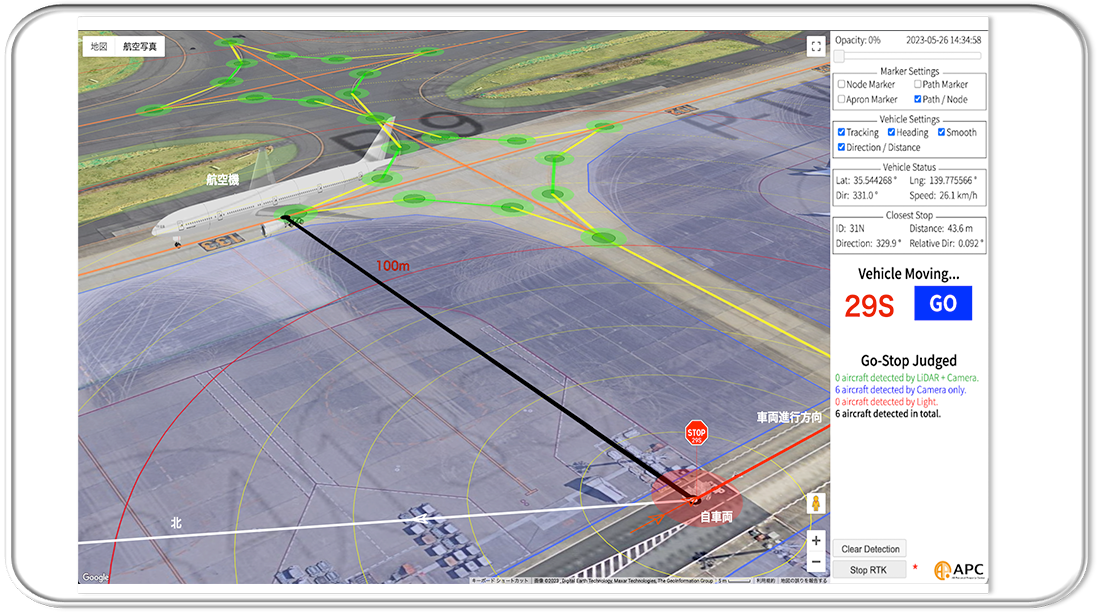
航空会社向け
空港制限区域内における航空機認識
360度光学カメラとLiDARを使用して航空機の位置を高精度で数値化
航空機と地上作業車両が交錯する可能性のある空港制限区域における安全確保の目的で、今まで人が目視や音によって行なってきた危険回避の判断の自動化のため、走行中の航空機を遠方から認識して位置を正確に検出するシステムを開発しました。空港制限区域内を地上走行中の航空機を対象として、LiDARと360度光学カメラを組み合わせてデータを取得し、車載用PC上で稼働中のAIモデルを使って3次元空間認識により航空機を検出(セグメンテーション)して、対象までの距離・角度を正確に算出します。結果はリアルタイムで実施者のタブレットPCの画面に表示されます。

360度カメラとLiDARを使って航空機の位置を正確に算出
自車両との相対関係から危険区域の進行可否をリアルタイムで判断

画像処理技術を活かして
工場自動化・省力化が実現できるシステムです
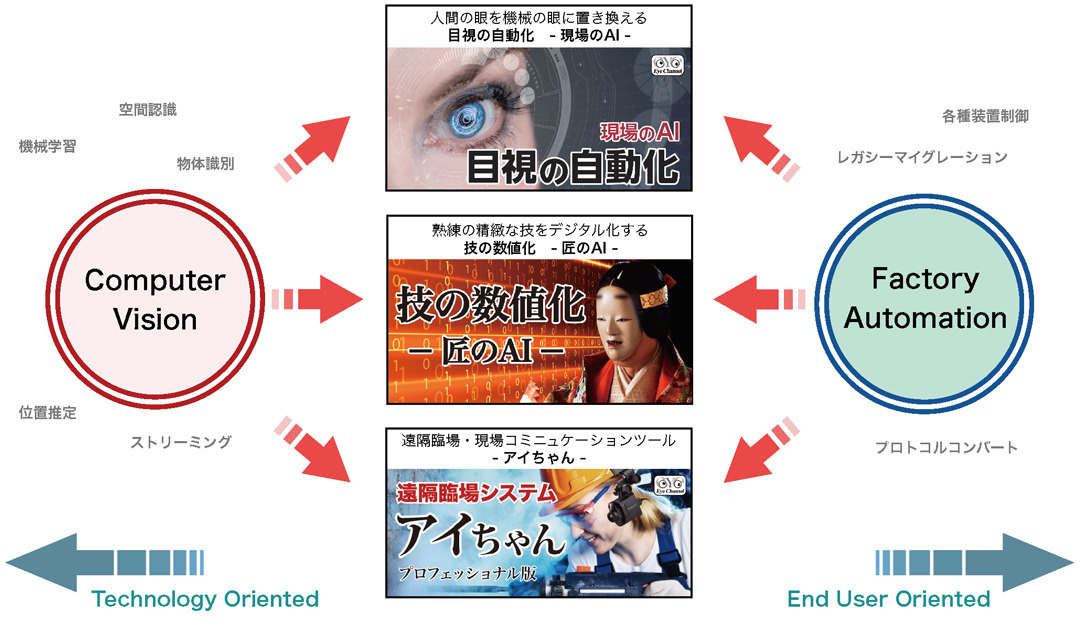
APCのコアコンピタンスは、画像・映像処理(Computer Vision)と工場自動化(Factory Automation)です。その2つの融合として、現場と最先端テクノロジーを結びつけたAIシステムを構築することで「目視の自動化 -現場のAI-」「技の数値化 -匠のAI-」という2つのソリューションを提供しています。また、オリジナルプロダクトとして「遠隔臨場・現場コミニュケーションツール -アイちゃん-」を開発・販売しています。

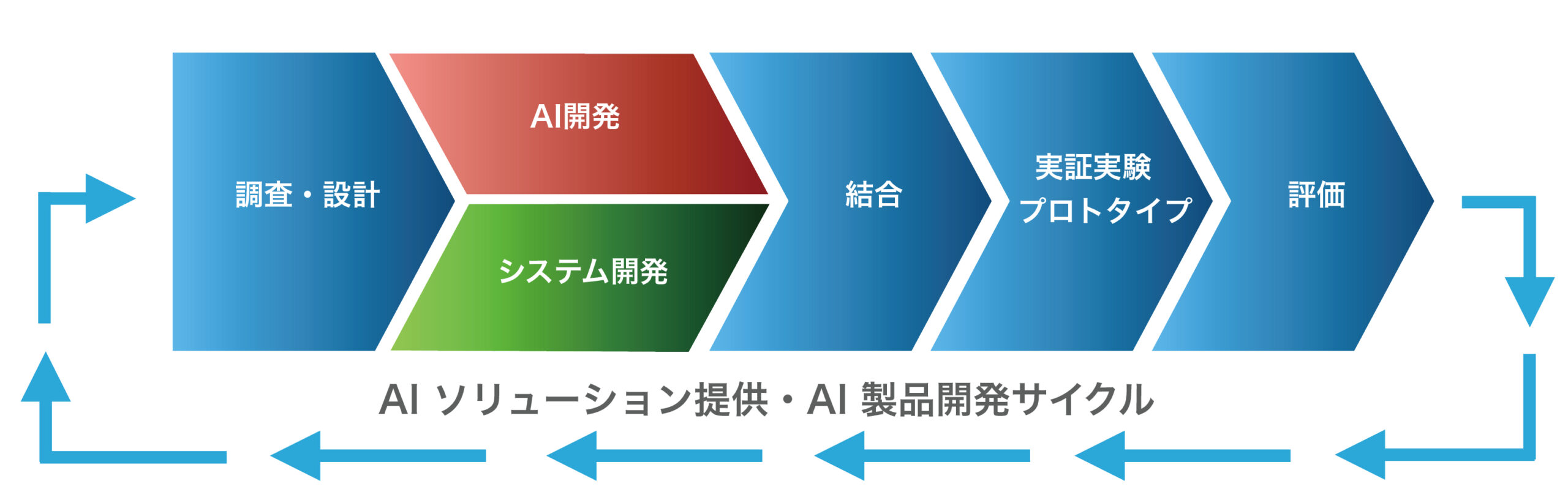
AI ソリューションを素早く安価に提供するための
Chimera AI Framework
データ収集や教師データ作成などの労働集約的プロセスの標準化、ツールの作成
モデル開発から学習済みモデルの評価までの一連のサイクルを一元管理
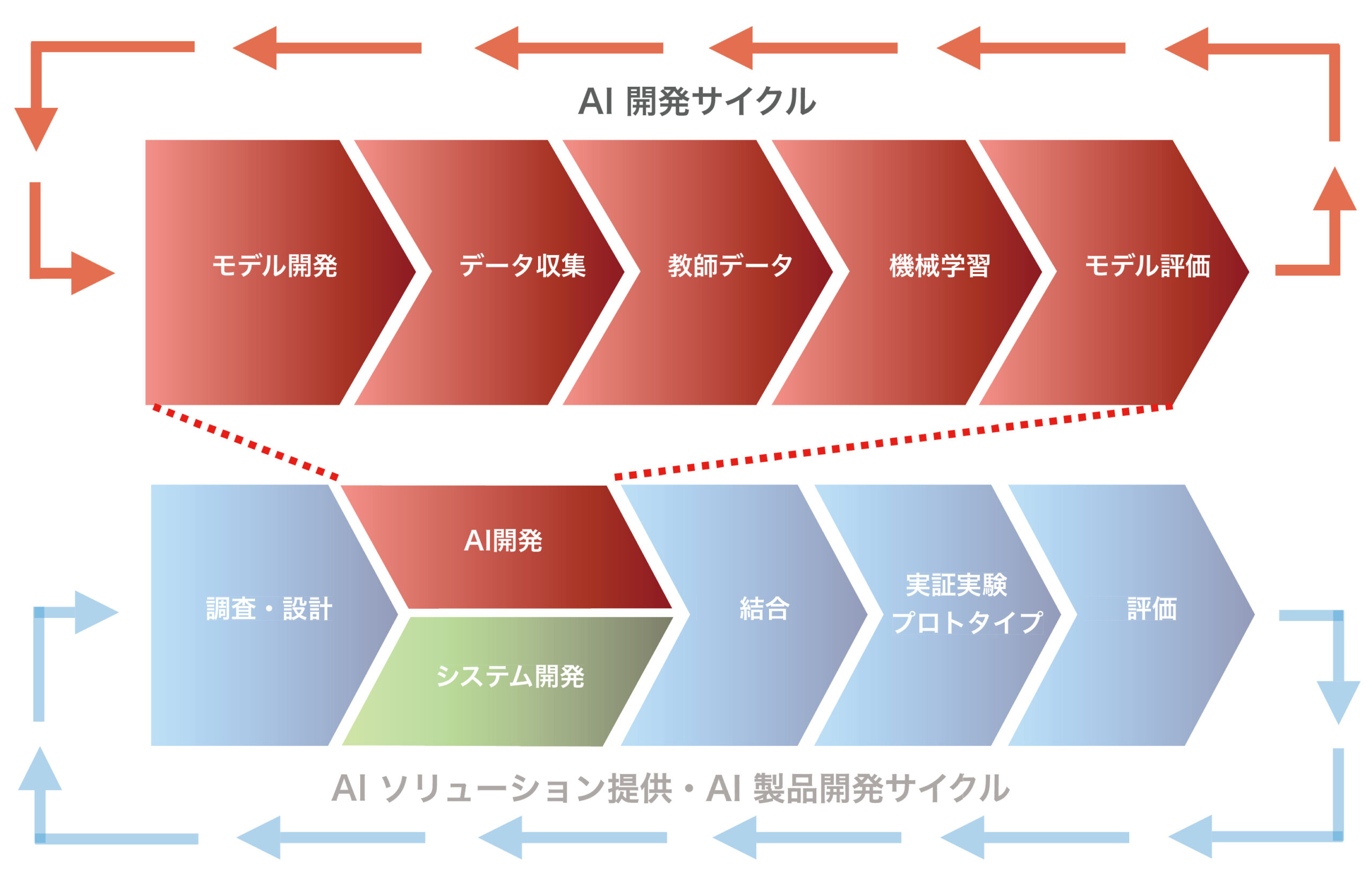

だから選ばれる!APCのAIソリューション4つの特長
- AI開発とシステム開発の両方を同時進行
- ハードウェア製造を除きソフトウェア開発は全て実施するOne Stop Company
- 製品化までの試行錯誤のサイクルを効率的に実施
- 実証実験だけで終わらないリアルなAIソリューションを素早く安価に提供
リアルなAIソリューションを身近に

LiDAR
赤外線レーザーを照射し反射光の戻る時間を正確に測定することで空間の各点までの距離を測ります

カメラ
LiDARに比べて解像度が高く物体の特徴を正確に判断するのに有効です

LiDARとは、
Light Detection And Ranging(光による検知と測距)の略称で、対象物にレーザー光を照射し反射光を受光するまでの時間を正確に計測することで距離を取得する装置のことです。レーザー光を多数照射することにより多数の点までの距離を一度に取得することができ、周囲の状況や対象物の形状を3次元的に把握することに役立ちます。近年では自動運転のための周辺状況認識に欠かせない装置となっています。
CONTACT
お問い合わせ
お客さまのご要望に応じ様々なご提案が可能です。お気軽にご相談ください。
メールでのお問い合わせ
お問い合わせフォーム
お電話でのお問い合わせ
097-573-6616
(平日8:30〜17:30)